
Mise en place du projet
Nous avons décidé de séparer le projet en trois parties principales:
– Le code de découverte et recherche du labyrinthe (nommé “Head”), géré par Muphins,
– Le code qui permet de faire bouger le robot (nommé “Body”), géré par moi même,
– Et tout le reste, comme la définition mécanique, la forme du robot, les composants etc., dont on s’est occupé tous les deux.
Evidemment, on s’est beaucoup consulté pour partager nos idées et pour la correction de bugs.
Vue d’ensemble des principaux éléments:
Microcontrôleur
Le micro utilisé pour le robot est un ATmega328 @20MHz de chez Atmel. Ce qui à orienté le choix est que nous connaissons bien cette famille, et que nous possedions déjà toute la plateforme de développement.
“Mais pourquoi autant de mémoire?” se demandent certains. Parce que le 88 (8Ko de Flash) paraissait trop juste, et le 128 (12Ko) était plus cher que le 328 (32Ko donc). Au moins cela rend le robot évolutif.
Moteurs
La motorisation est effectuée par deux servos continus. Le principal interet étant qu’on peut les commander en PPM facilement juste avec des interruptions PWM. Mais on a aussi un moto-réducteur (plus de couple) dans un boitier relativement petit, et la consigne appliquée au servo ne modifie pas l’angle de sortie comme sur un servo classique mais la vitesse (enfin… normalement. Voir dans le prochain article les gros problèmes rencontrés…).
Capteurs
Il existe deux sortes de capteurs couramment utilisés en robotique: les sonars à ultrasons, et depuis quelques années les télémètres infrarouges.
Ces derniers ont la particularité d’être très directifs, avantage non négligeable dans un couloir étroit (ou dans un labyrinthe) et sont moitié moins cher que les sonars (et ça on aime bien).
En revanche les télémètres ont une fenêtre de fonctionnement (beaucoup?) plus réduite que les sonars, et sont plus sujets aux interférences (lumière du soleil par exemple).
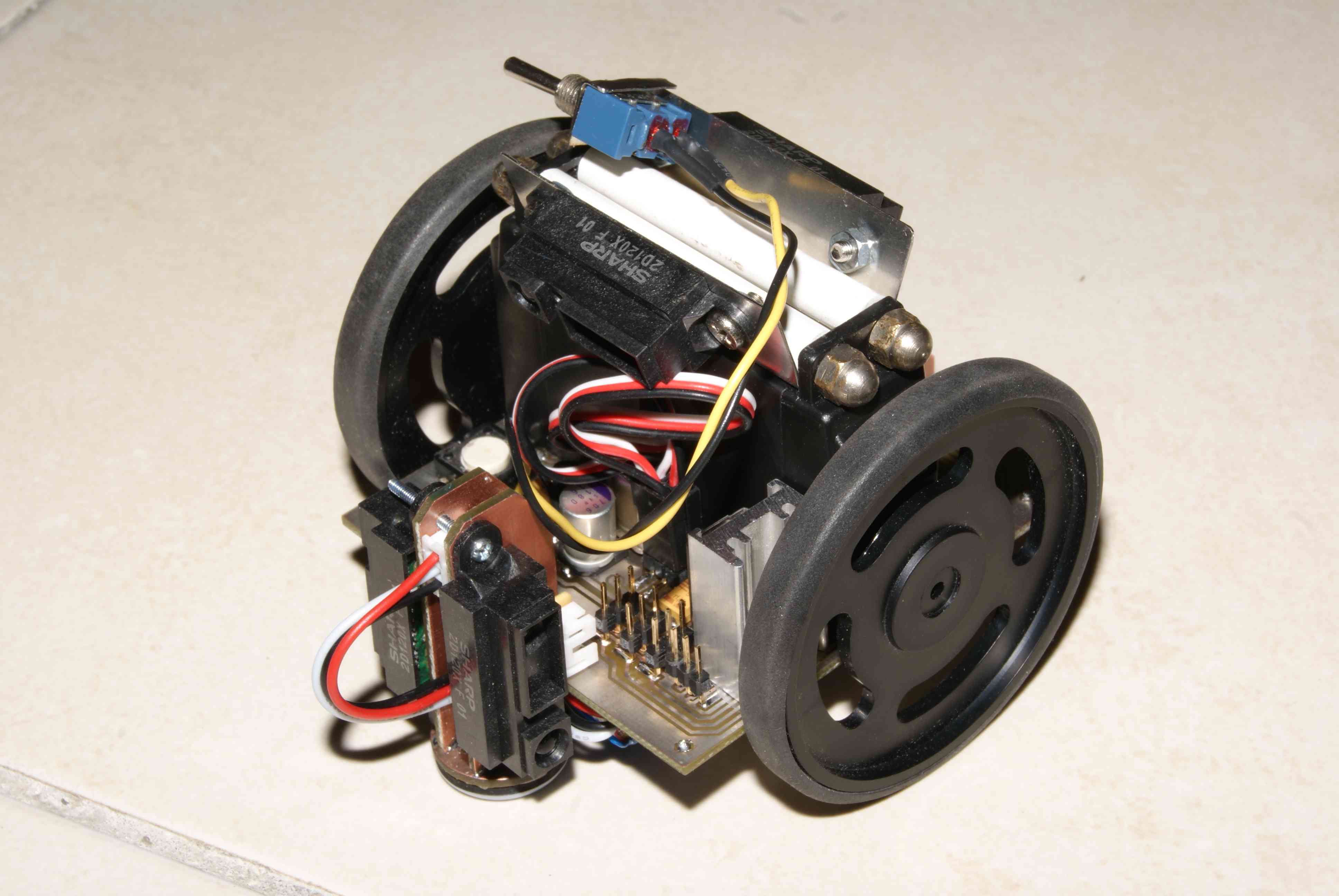
On a quand même parié sur eux, et les “yeux” du robot sont donc des GP2D120 de Sharp. Au nombre de quatre, le robot pourra voir dans toutes les directions!
“Mais pourquoi quatre quand trois suffiraient?” Oui, on aurait pu tourner le robot quand il était dans un cul de sac. Mais justement! Le but est d’inverser le sens de déplacement, le derrière devenant le devant.
Alim
La puissance est fournie par une batterie LiPo deux éléments 7,4V-1300mAh. Et elle est régulée par deux… ben deux régulateurs: un pour les moteurs, et l’autre pour l’ATmega et les capteurs.
Ceci pour limiter l’impact d’un rail d’alim sur l’autre, et comme ça on peut alimenter les servos à presque 6V et la logique en 5V (c’était pas obligé, mais ça fait bien).
Chassis
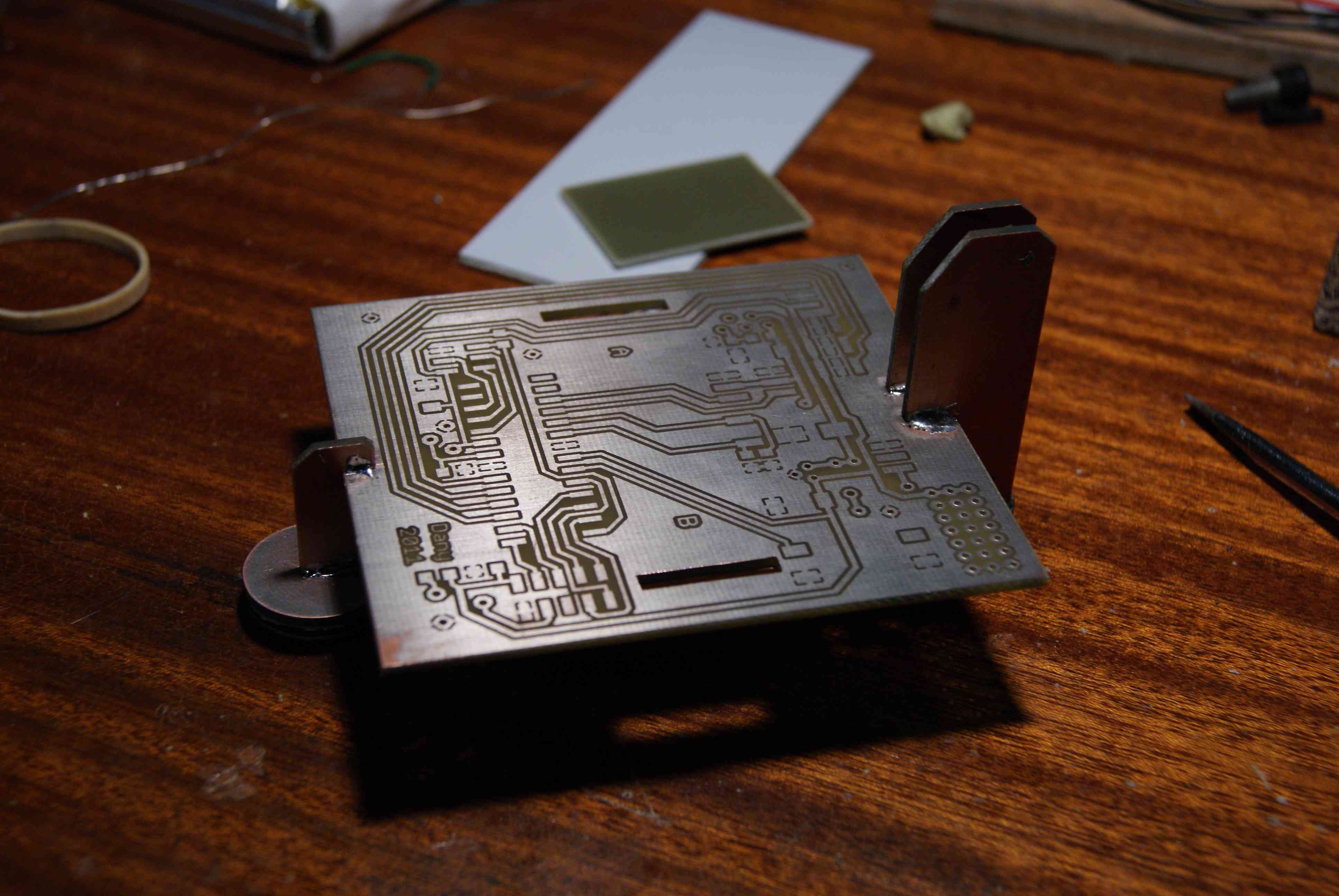
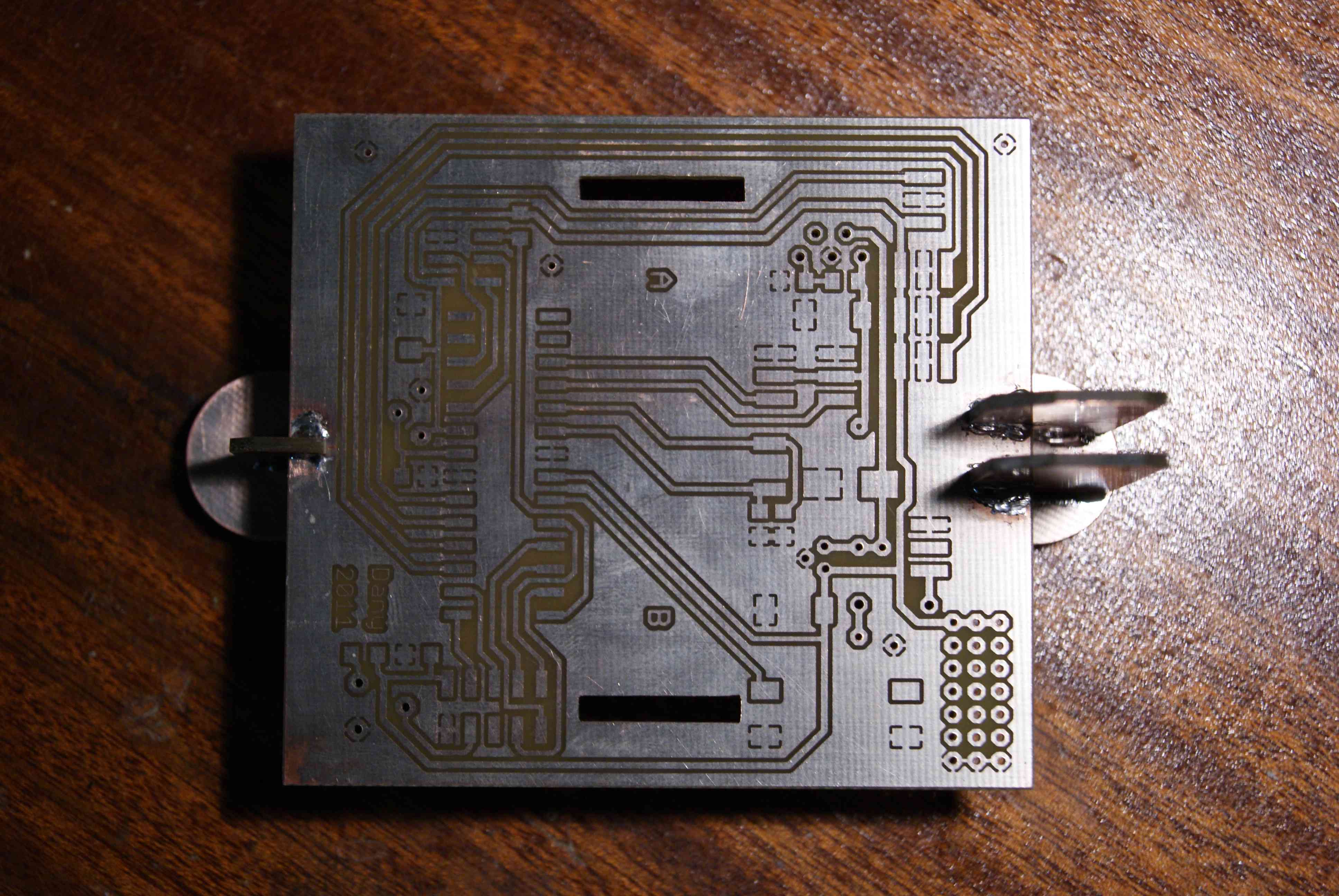
Le chassis est en fait le PCB du Robot!
Avantages: moins de matière, donc moins de poids (même si dans tous les cas on aurait pas fait de chassis en fonte), mais surtout on peut souder les différentes parties du chassis: moins de visserie, et beaucoup plus solide!
Inconvénients: il faut en tenir compte à la conception du CI, ce qui veut dire qu’il faut avoir les pièces pour être sûr des dimensions. Un peu moins de modularité au niveau des pièces soudées (on peut toujours effectuer des modifs, mais c’est plus difficile et c’est presque impossible de dessouder la pièce sans abimer le reste).
Les principaux composants (micro, quartz, servos, roues, régulateur 5V, télémètres) ont été commandés sur Gotronic, pour environ 100€.
La batterie et son chargeur on eux été achetés sur Ebay pour une vingtaine d’euros.
Tous les autres composants sont de la récup!! :)
Pour le financement l’IUT de Salon de Provence nous à sponsorisé de 100€ (un grand merci à eux).
Conception
Pour nous aider à bien visualiser le robot et être certains de sa structure on s’est aidé de Solidwoks pour modéliser le robot ainsi que le labyrinthe:

Modélisation sous SW
On peut voir que ça ne correspond pas beaucoup à la réalité, mais c’est tout de même très utile pendant la phase de conception!
Les fichiers Solidwoks (v2010) sont téléchargeables ici (8Mo).
Les fichiers au format Eagle et pdf sont eux disponibles ici (160Ko)
Réalisation
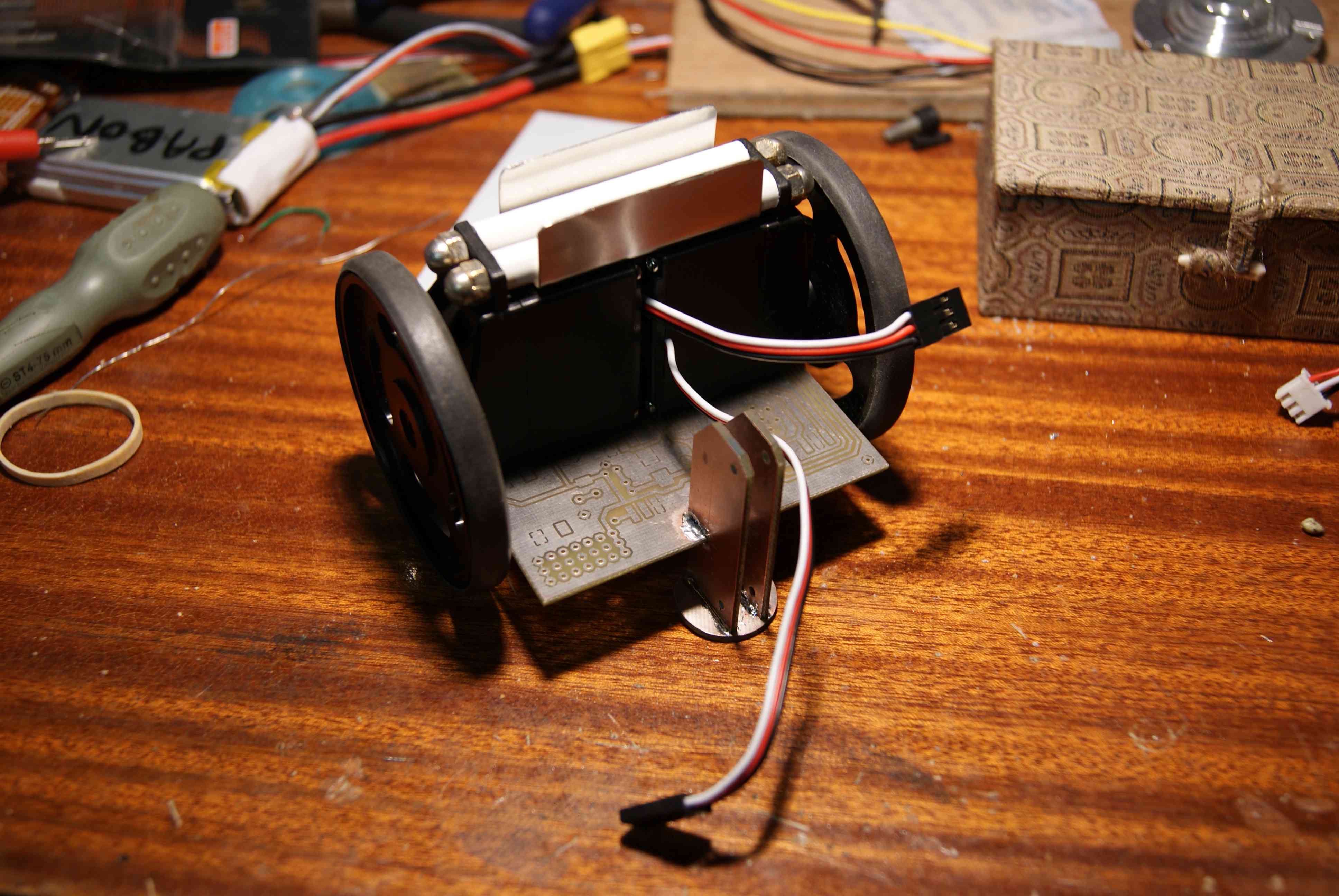
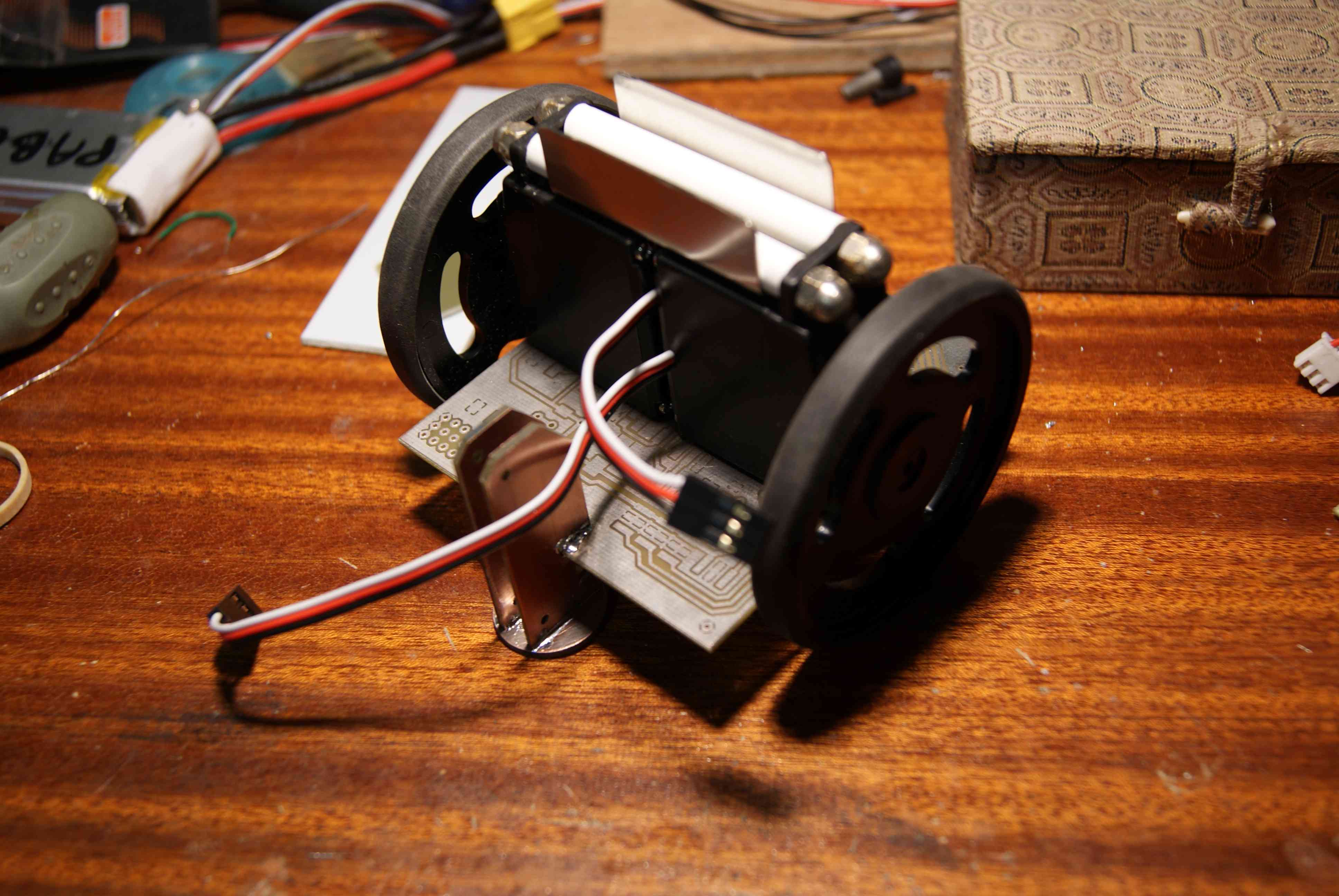
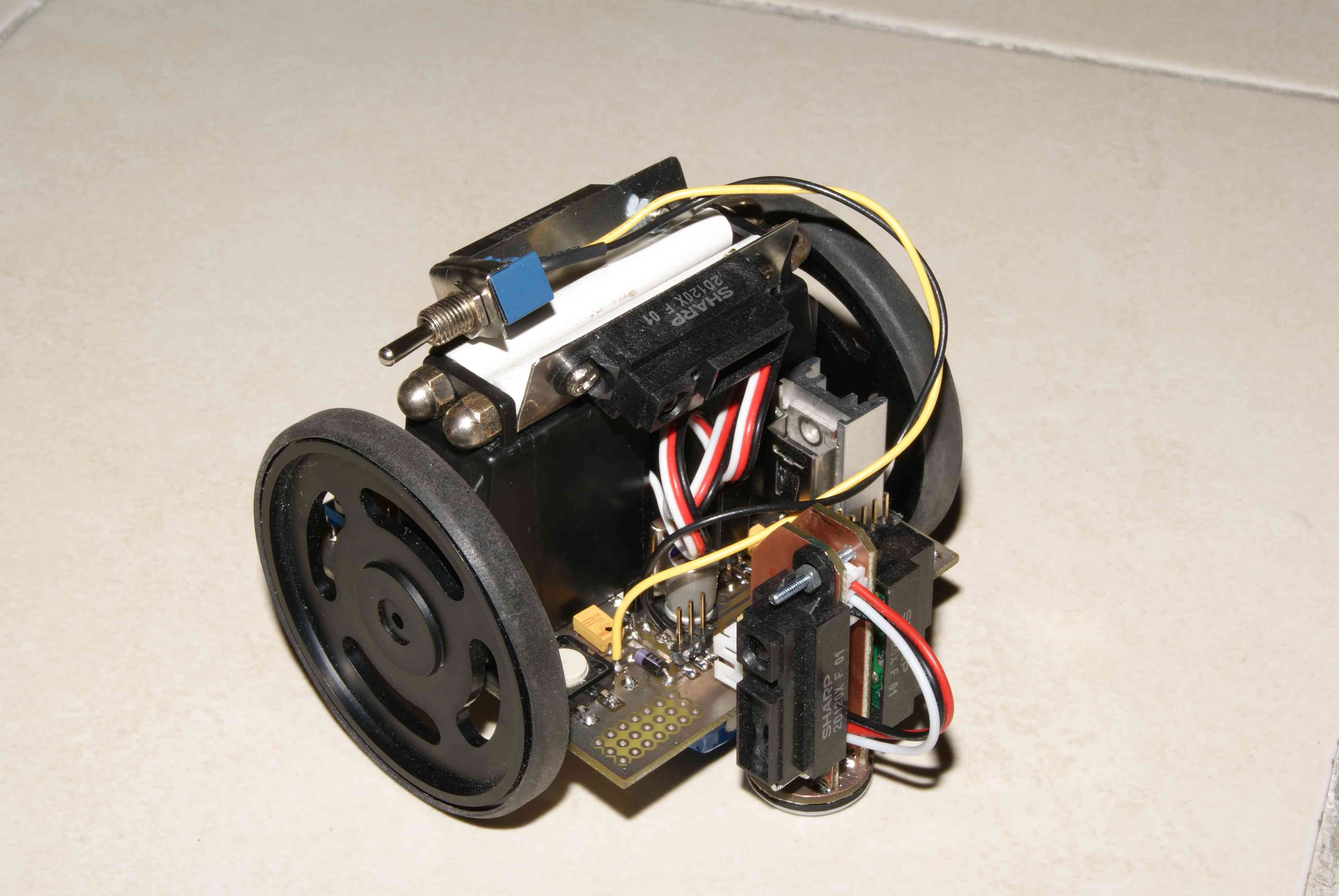
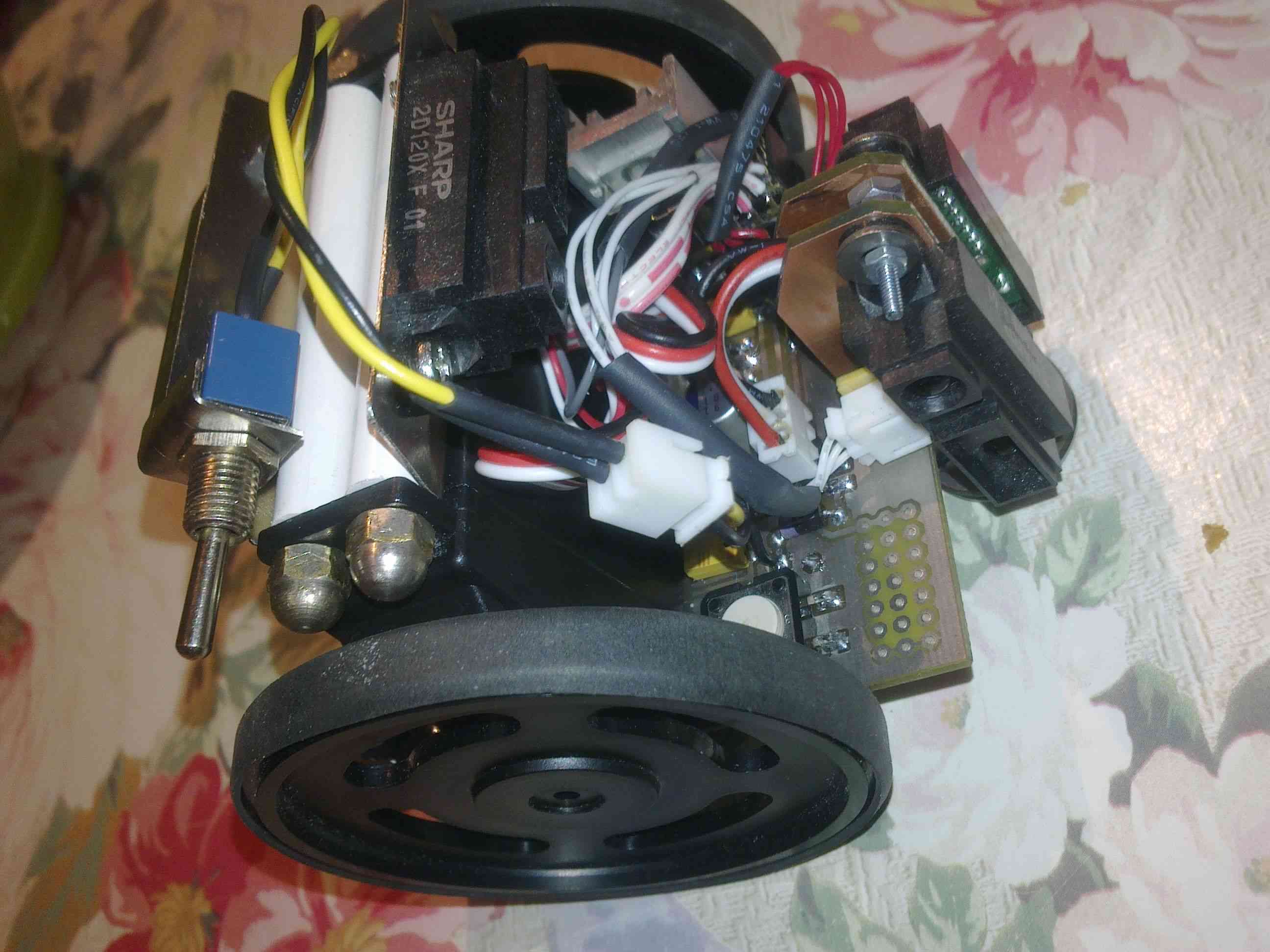
Voici quelques photos du robot une fois assemblé (sur celles-ci il manque encore l’écran de débug):
-

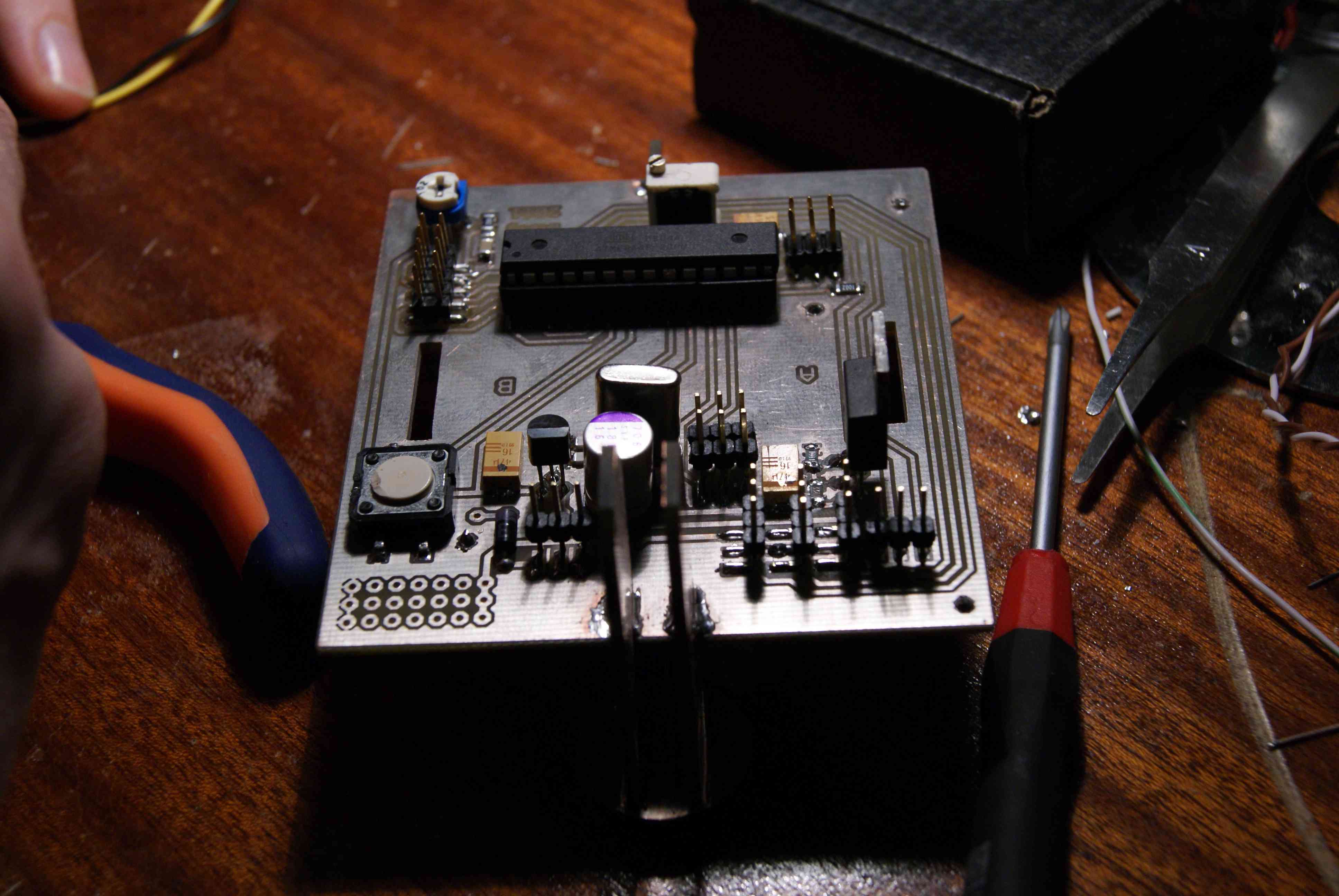
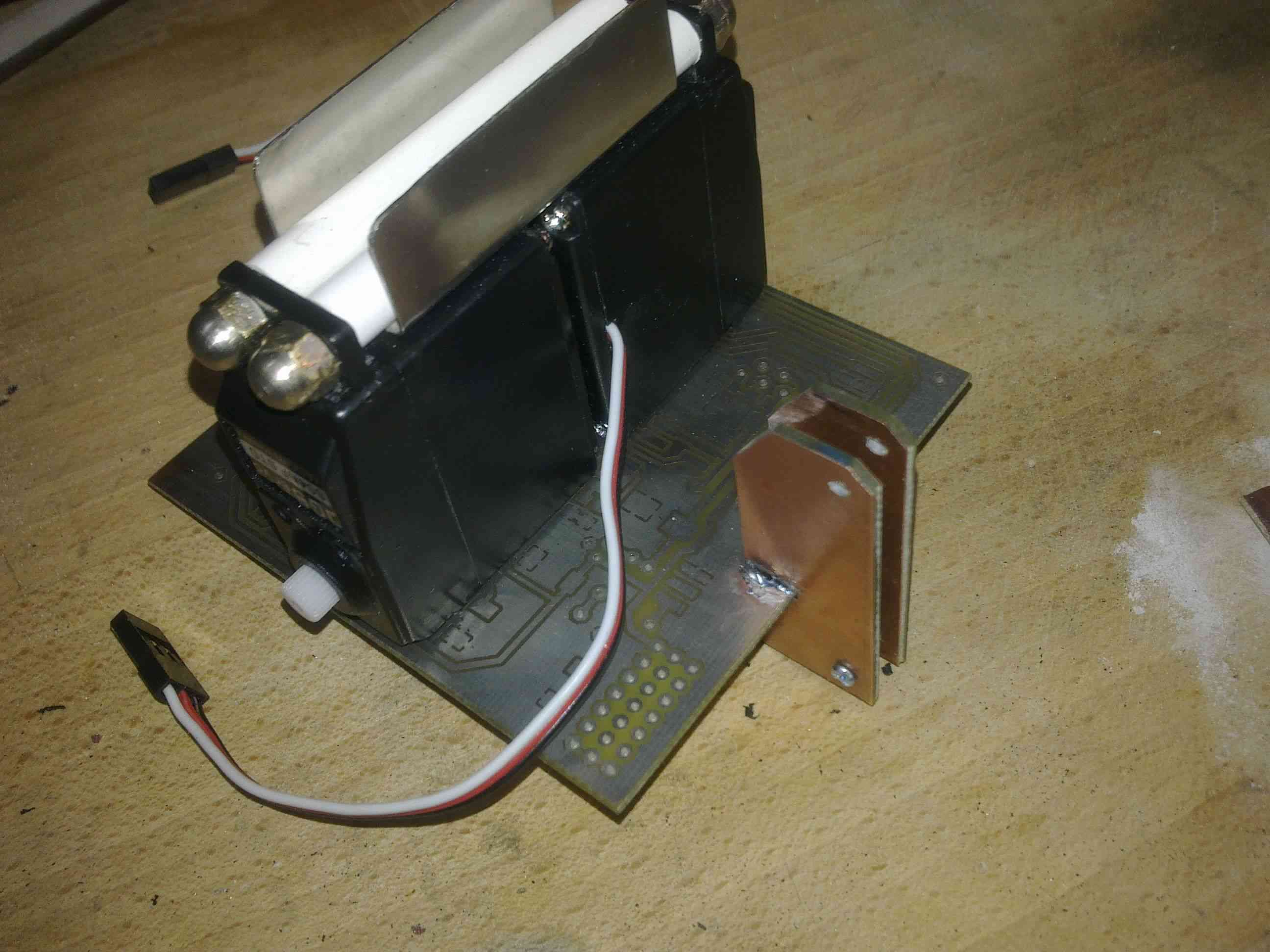
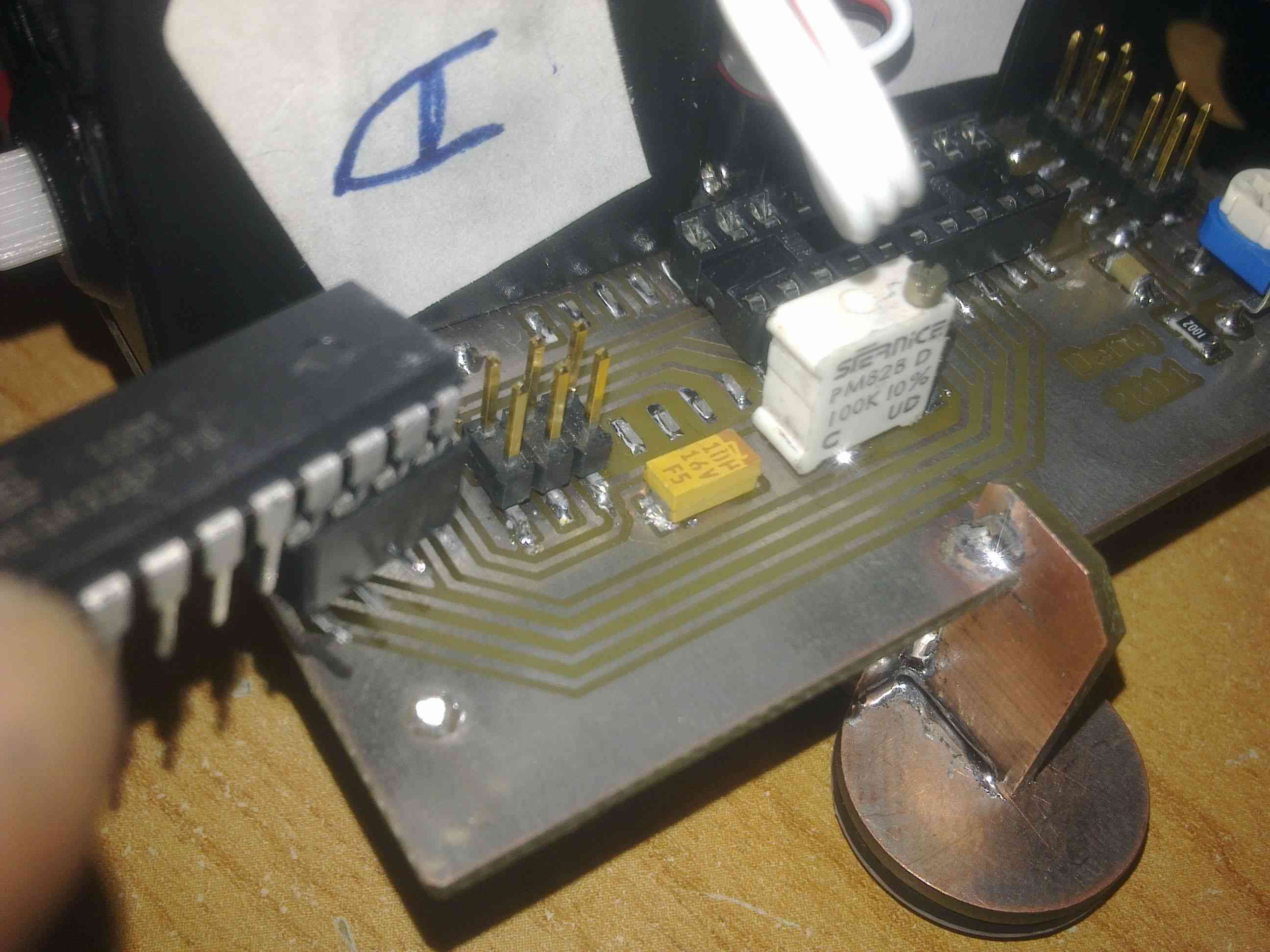
- Gros plan sur la soudure

-

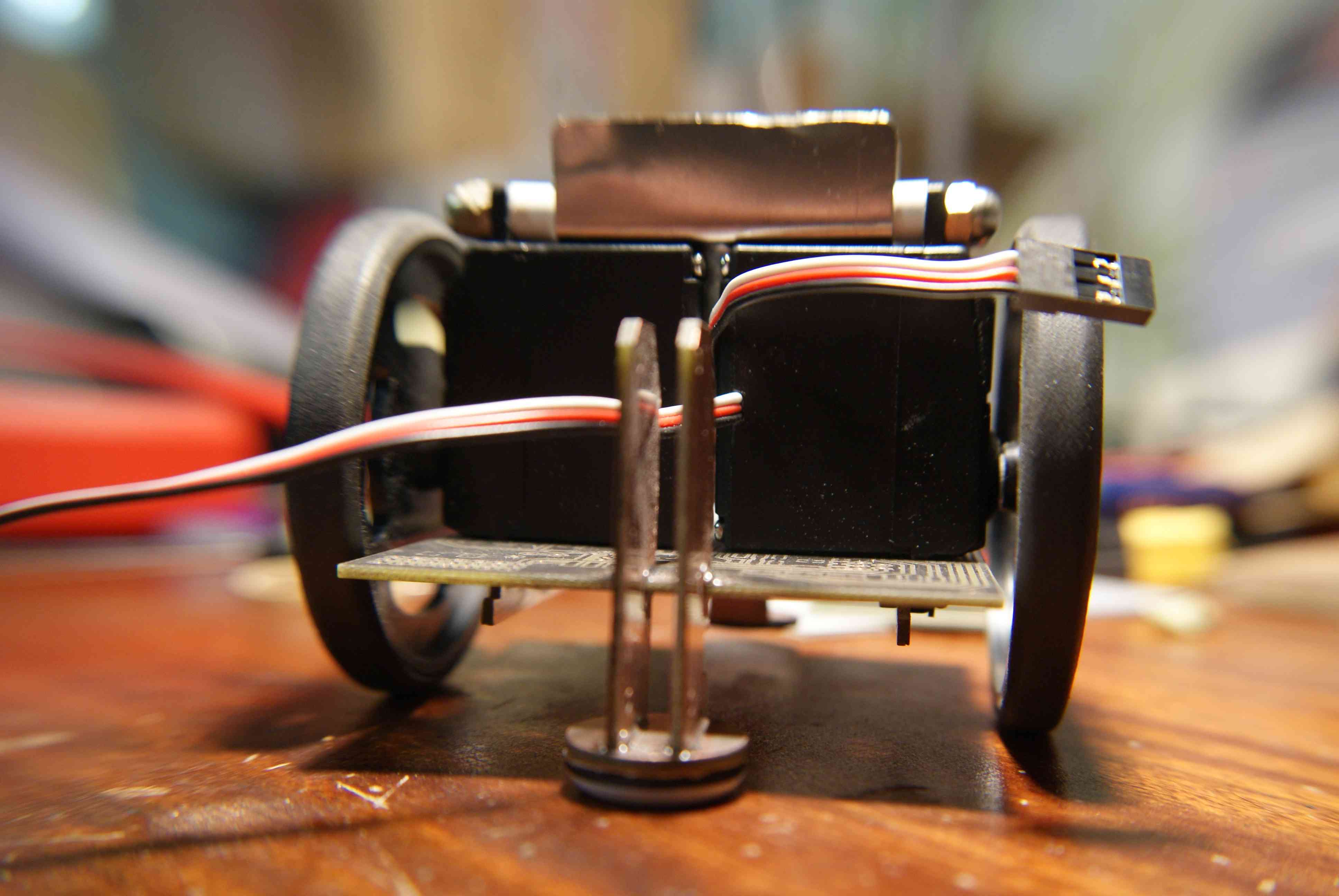
- Le pied arrière

-

- Soudure finite! Place aux tests de continuité
-

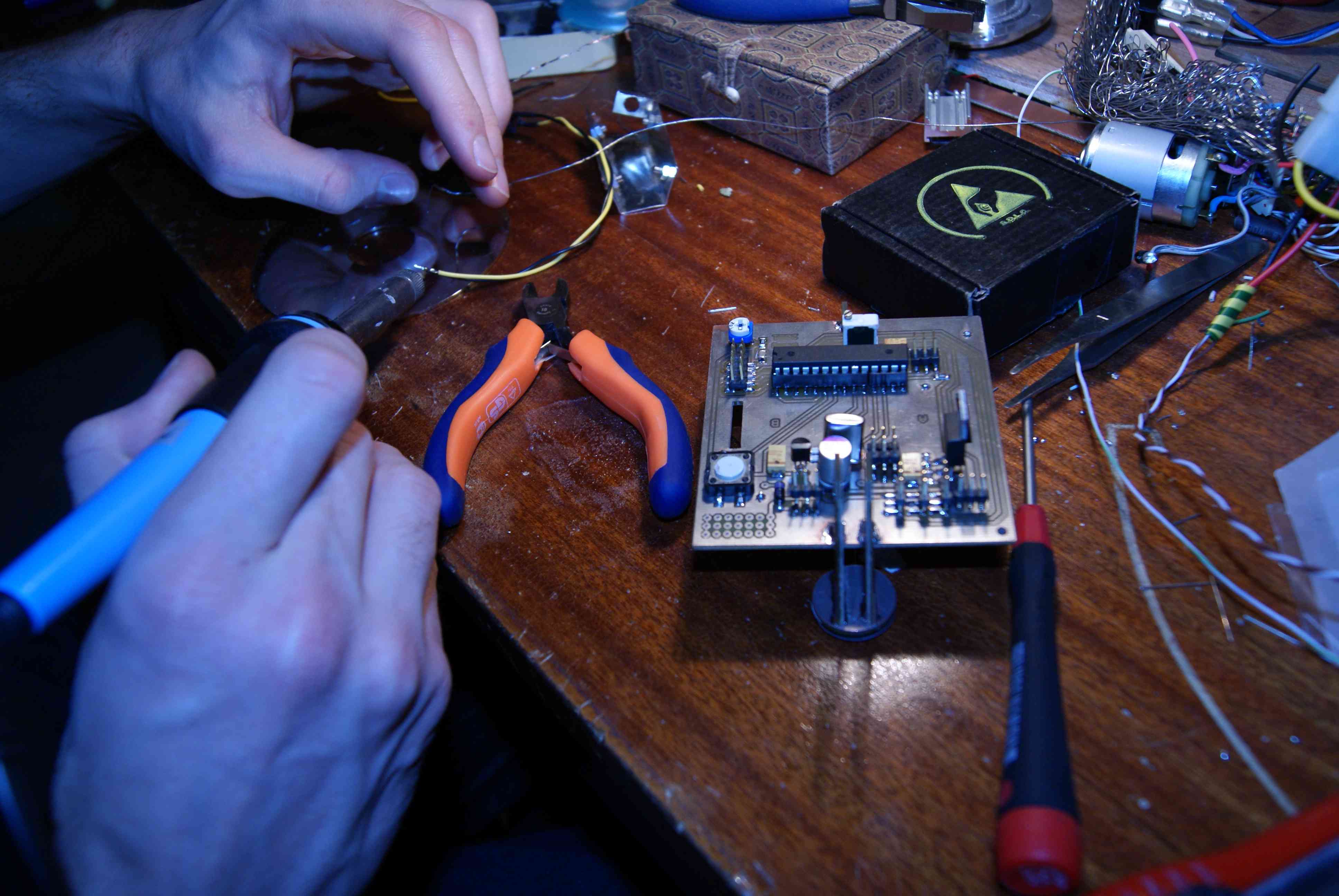
- Ça soude ça soude…
-

- Vue d’artiste
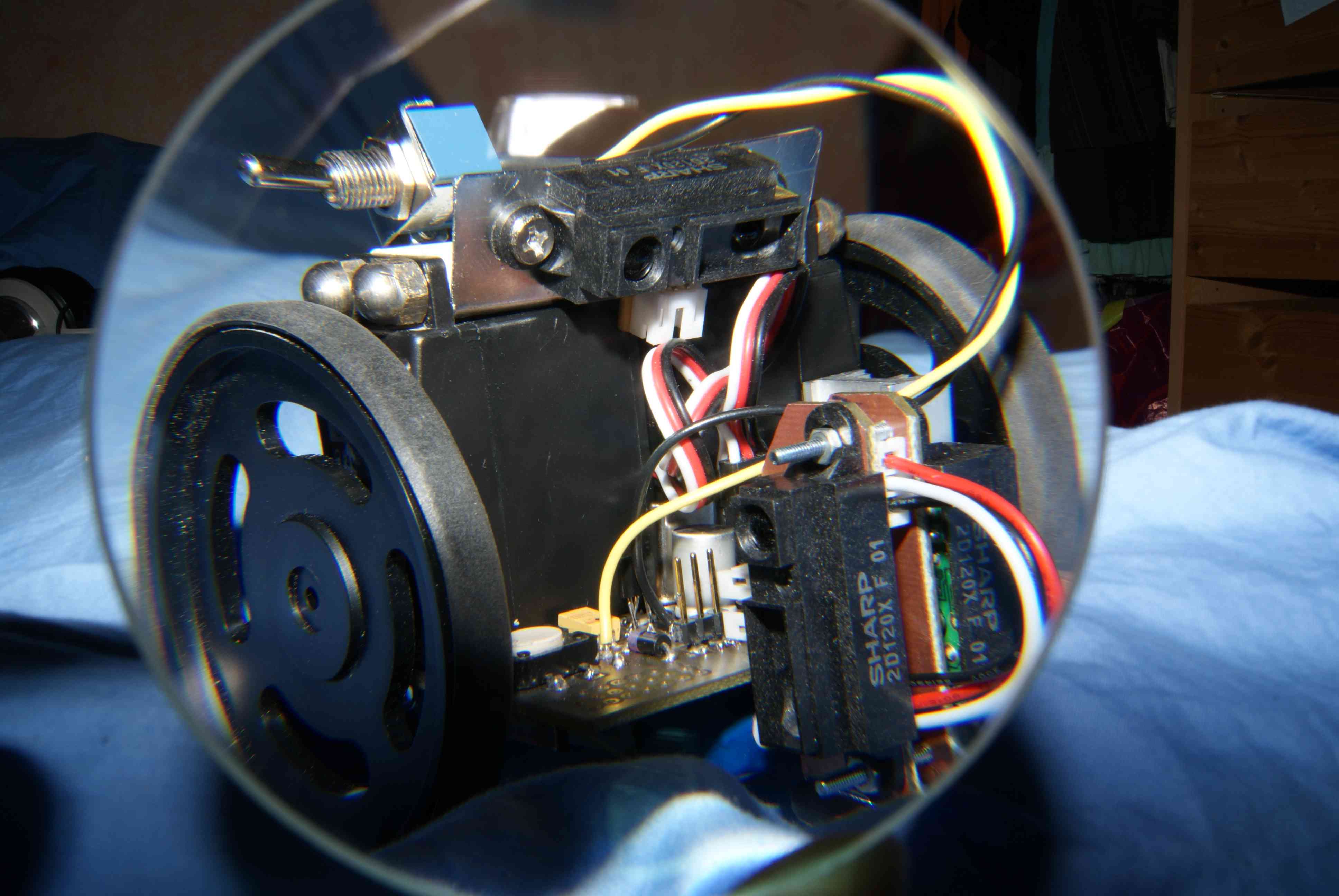
-

- Ça lime ça lime…

-

- Construction d’un des support capteurs
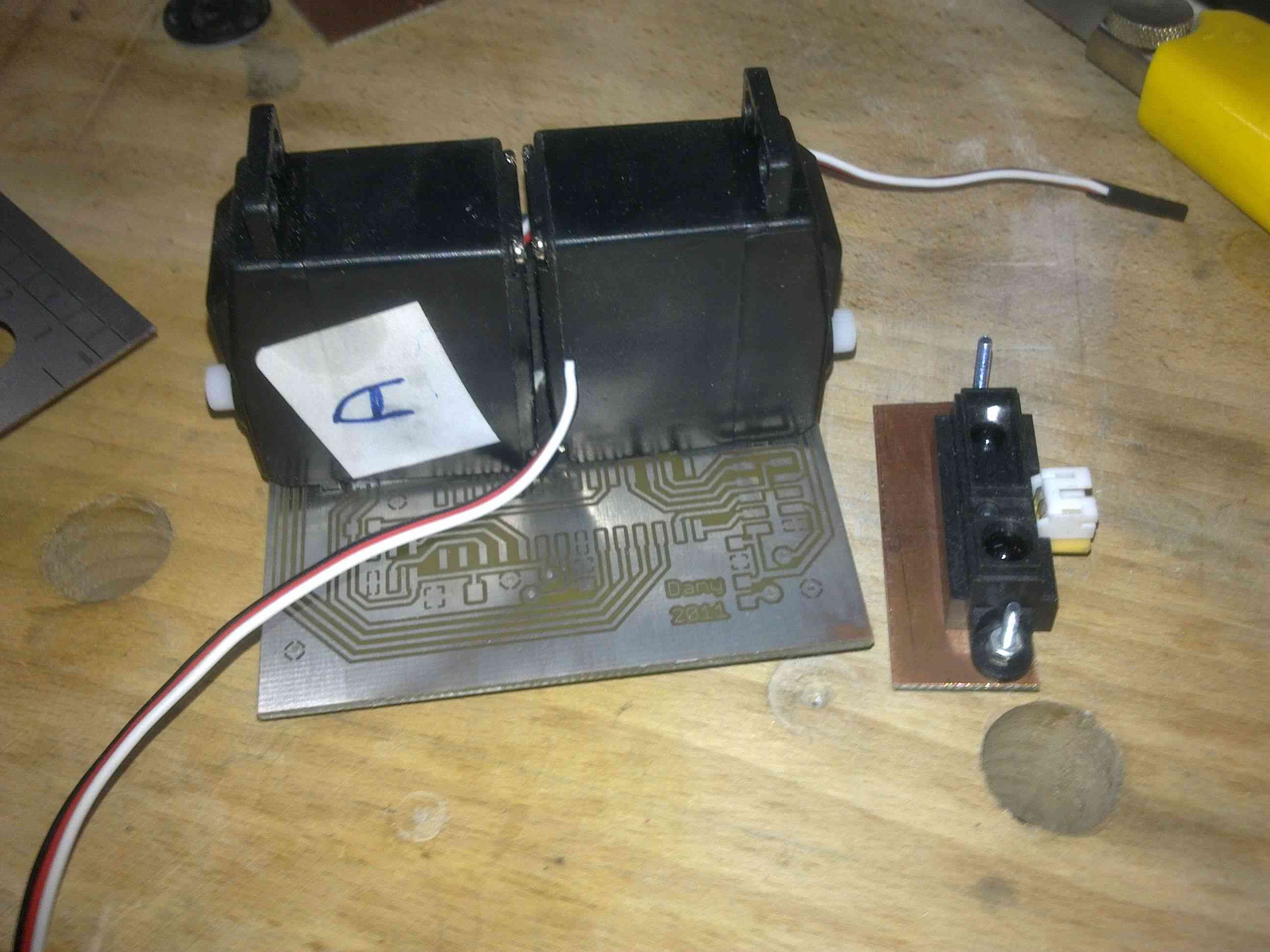
-

- Le deuxième support en cours
-

- Mais qui a fait ces soudures?! Zut c’est moi…
-

- Dany le robot
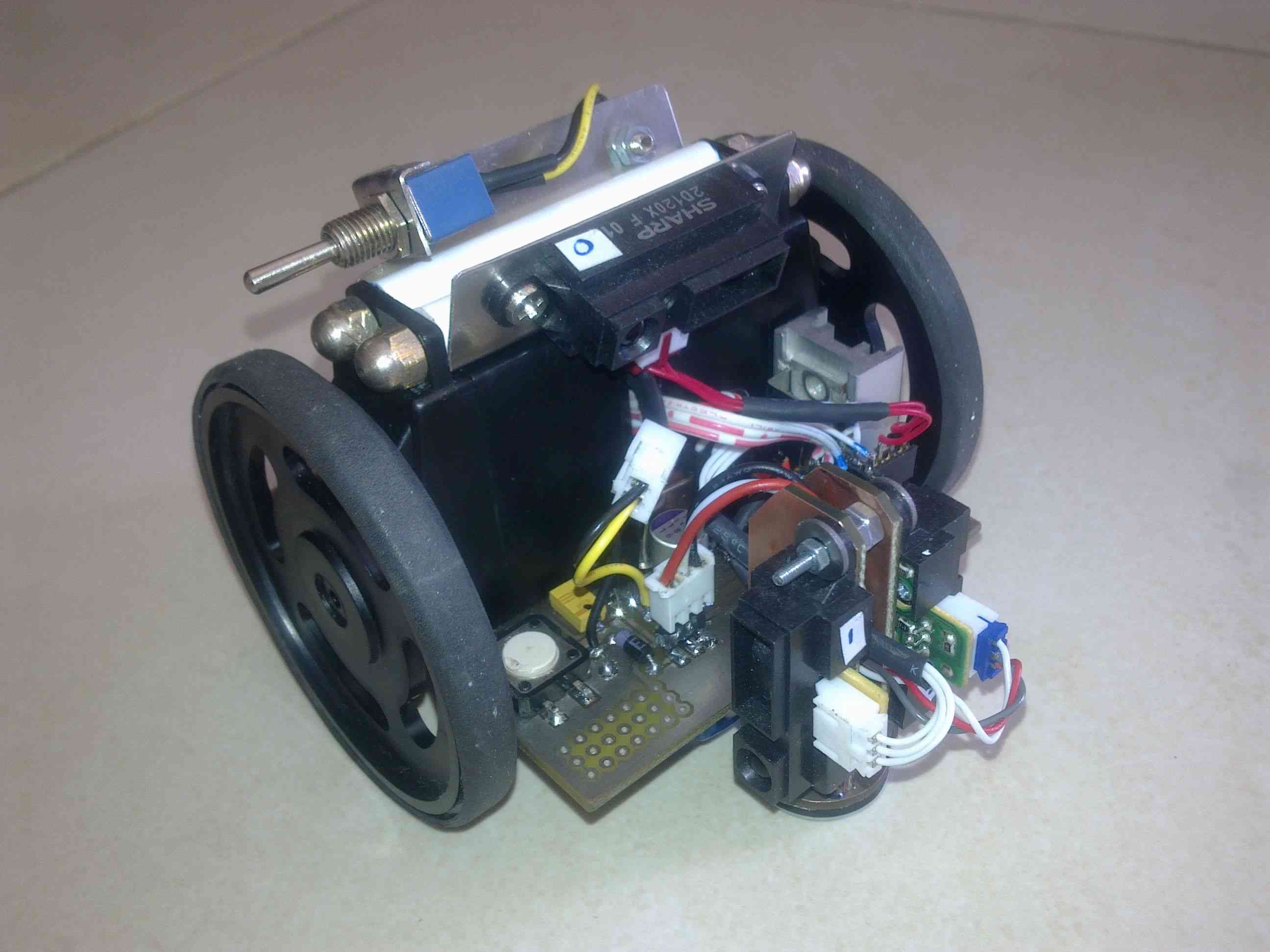
-
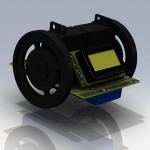
- Modélisation sous SW

 Hack a Day
Hack a Day Semageek
Semageek Oscarliang
Oscarliang